
Agility
23-DOF Bionic Configuration, Millisecond Dynamic Response
Weighing only 400g, the palm enables 2 fist extensions per second — agile and light as a human hand.
Perfect score in Kapandji Thumb Opposition Test, ensures free extension movements and excellent shape adaptation.
Precision
Repeatability of ±0.1mm, for consistent precision control down to the millimeter
Back-drivable under load for hybrid force/position control, achieves force control accuracy down to 0.05N.
Intelligence
Perceptive, Thinking, Expandable
Multi-modal perception fusion and a human-like "cerebellum" enable adaptive grasping, slip detection, and compliant reflexes.
Open development ecosystem supports customization, expansion, and integration.
Power
Hook & Grip with Immense Force
Single-hand grasp load of 12kg,
rated continuous operation load of 4kg.
Wear‑ and puncture‑resistant palm surface.
Powerful output from micro linear actuators.
Rigid yet resilient.
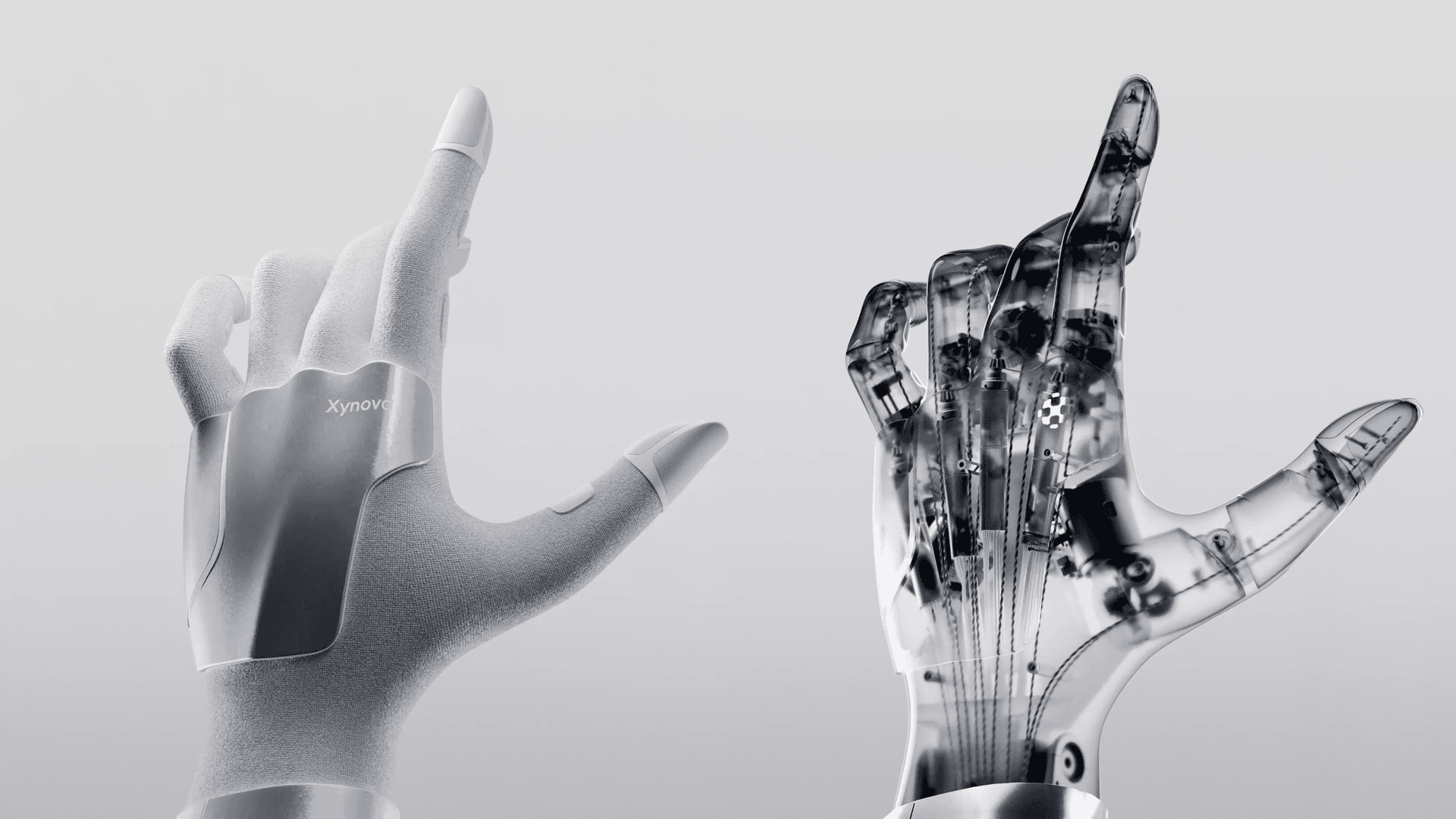
Aesthetics
Redefine Human‑Robot Aesthetics from Vision to Touch
Full dimensional bionics in size, joints, and kinematic structure. Soft replaceable skin, and anti‑pinch seams for safety.

Reliability
Millions of open/close cycles, Enduring and Steady.
Dustproof, dropproof, and impact-resistant. Anti-creep tendon ropes, and full‑range temperature control ensure stable operation.
From high‑frequency tasks to extreme environments — remains as good as new, reliably worry‑free.